无人机智能识别交通目标,AI视觉赋能城市交通治理新高度
在城市化快速发展的当下,如何实现对道路交通的智能化管理、保障出行安全,成为城市治理的重要命题。传统的交通监控往往依赖地面摄像头,受限于固定视角与安装环境。而今,随着人工智能与无人机技术的深度融合,一种更高效、更灵活的交通感知方案正在兴起——无人机AI目标检测系统。
高空视角,全面感知
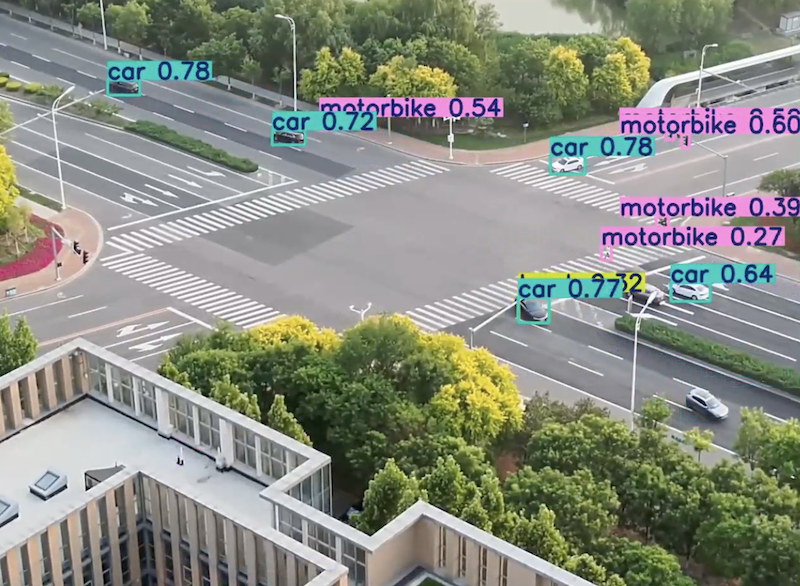
如图所示,这是一帧无人机从高空航拍下来的城市十字路口画面,图像经过AI目标检测算法处理后,我们可以清晰看到不同类别的交通参与者被准确识别并标注:包括小汽车(car)、摩托车(motorbike)等。
每一个目标的识别框上方标注了类别与置信度分数(confidence score),例如“car 0.78”表示该目标被识别为汽车,且识别准确率为78%。这类高置信度标注不仅表明系统识别的准确性,也为后续的数据分析和事件检测打下坚实基础。
技术能力亮点
1. 多目标实时检测
得益于深度学习中的目标检测模型(如YOLO、SSD等),系统可以在单帧图像中同时识别多种类型的交通目标,并进行跟踪与分类。
2. 高精度识别
画面中的检测结果显示,汽车、摩托车等目标均能在不同光照、不同角度下被清晰识别,说明模型具有较强的鲁棒性和适应性。
3. 灵活部署能力
与固定监控摄像头不同,无人机具备高机动性和视角灵活性,能够快速部署于交通事故现场、大型活动区域或临时封控地段,完成动态监控任务。
应用场景拓展
这种“空地结合”的智慧交通识别方案,已在多个场景中展现出巨大潜力:
• 城市交通监测:实时掌握交通流量、违规变道、逆行等行为;
• 应急指挥:事故发生后快速调度无人机掌握全局态势;
• 智慧园区/工地:对车辆类型、流动方向进行精细化管理;
• 无人驾驶验证:为自动驾驶测试区域提供高空动态数据补充。
无人机 + AI视觉技术正逐步成为新一代交通感知系统的核心力量。从“看得见”到“看得清”,再到“看得懂”,它不只是一次技术叠加,更是一次交通治理理念的革新。我们相信,在不久的将来,这类系统将在更多城市中落地,成为构建智慧城市的重要基石。