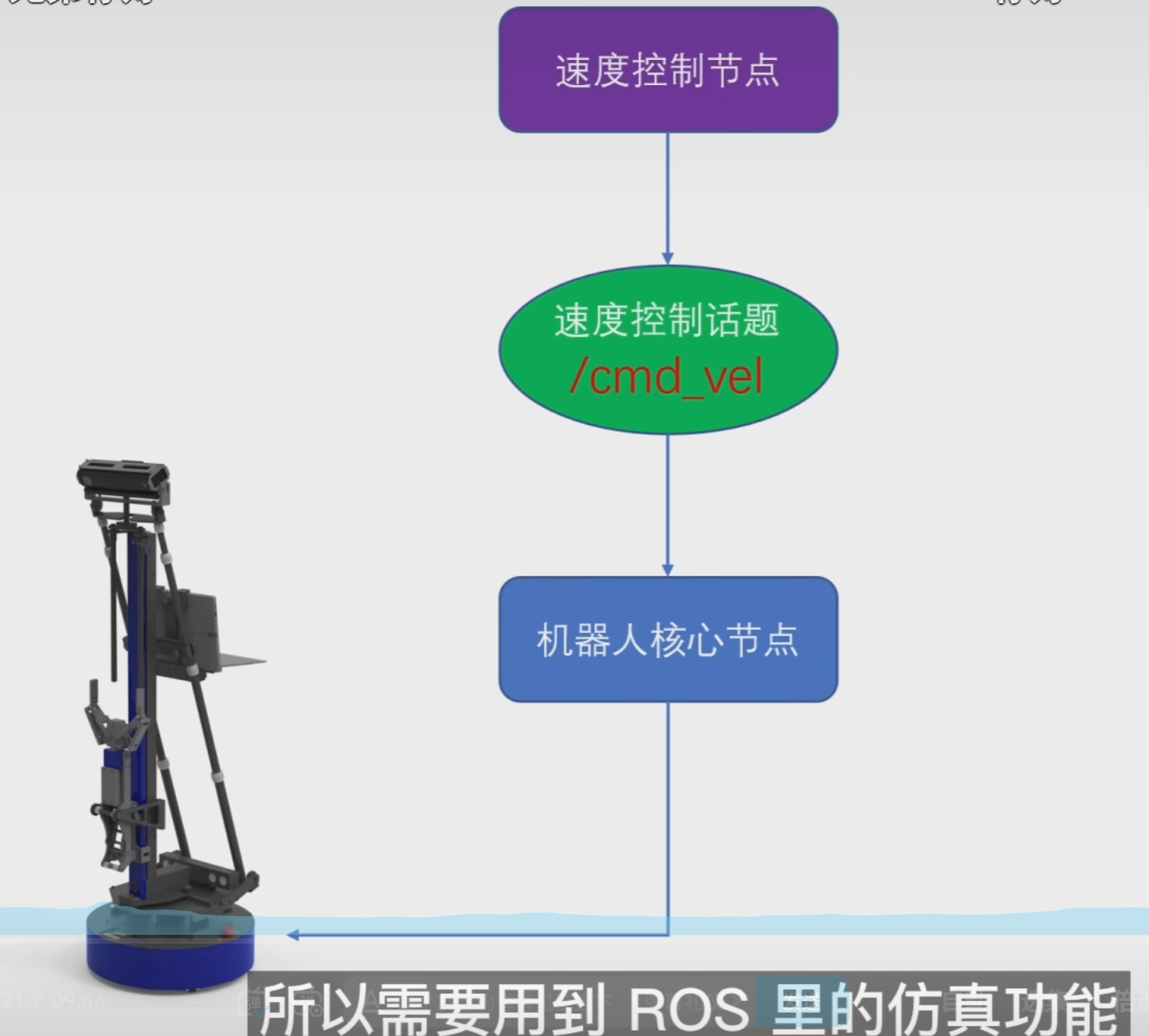
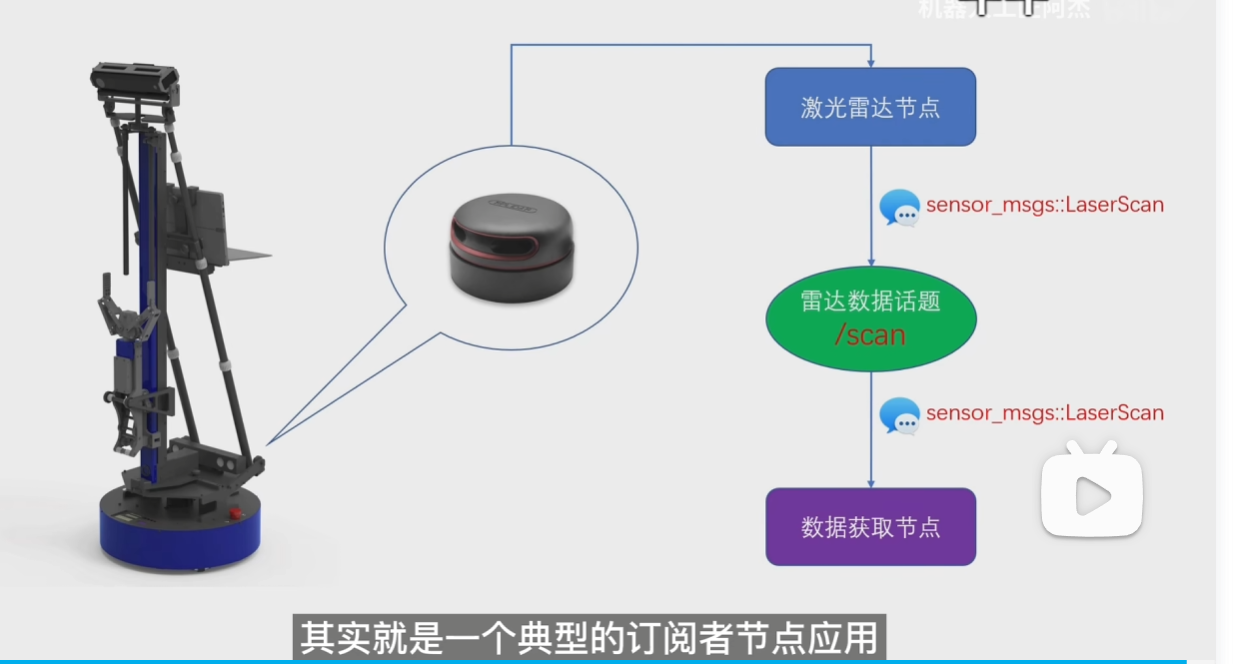
当前位置: 首页 > news >正文 Ros(控制机器人运动) news 2025/8/5 6:05:22 就是 俩节点 一个发布 一个接受。 然后接受方(仿真内 接受到 自动就是电机协议自动启动) )————— 激光雷达接受信息 查看全文 http://www.lqws.cn/news/126757.html 相关文章: C语言基础(11)【函数1】 深入理解C#中的Web API:构建现代化HTTP服务的完整指南 Linux-文件管理及归档压缩 2025年6月4日收获 CentOS7关闭防火墙、Linux开启关闭防火墙 Linux 的 find 命令使用指南 构建 MCP 服务器:第一部分 — 资源入门 django ssh登录 并执行命令 Linux 特殊权限位详解:SetUID, SetGID, Sticky Bit 网络可靠性的定义与核心要素 Redis初识 Git-git跟踪大文件 01串(二进制串)与集合之间存在天然的对应关系 ← bitset 第三篇:MCP协议深度实践——从理论到生产级AI智能体系统 如何设计订单号生成策略? Java基础原理与面试高频考点 Python网页数据抓取常用的库及方法介绍 稻米分类和病害检测数据集(猫脸码客第237期) 第八部分:阶段项目 6:构建 React 前端应用 LeetCode[513]找树左下角的值 postman自动化测试 JVMTI 在安卓逆向工程中的应用 国际数字影像产业园智慧办公赋能文创企业加速成长 PyTest框架学习 SARIMA时间序列分析:三大模型对比 Efficient RAW Image Deblurring with Adaptive Frequency Modulation 代码训练LeetCode(21)跳跃游戏2 数据分析之OLTP vs OLAP [C++入门]简化的艺术---对模版的初步探索 powershell 安装 .netframework3.5