Science Robotics:UCLA 贺曦敏团队综述自主软体机器人
在机器人中实现类似生命的自主性一直是研究的方向,但目前大多数软体机器人仍依赖外部刺激操控来产生持续运动。为了实现能够自我调节感知 、 决策和驱动的自主物理智能(autonomous physical intelligence,API),一种有前景的方法是在材料中嵌入非线性时滞反馈机制(nonlinear time-lag feedback)。鉴于此,加州大学洛杉矶分校贺曦敏教授及博士后陈驰、博士生施鹏举等人联合Timothy J. White 教授,Rebecca Kramer-Bottiglio教授,Metin Sitti 教授,Tetsuya Iwasaki教授就如何实现此类反馈做了总结,并追溯了此类软体机器人的发展历程及不同的应用领域 。该 工 作 以 题 为 “Advancing physical intelligence for autonomous soft robots”发 表在最新一期的《Science Robotics》上,得到上海交通大学刘河洲 教授与陈玉洁研究员的支持。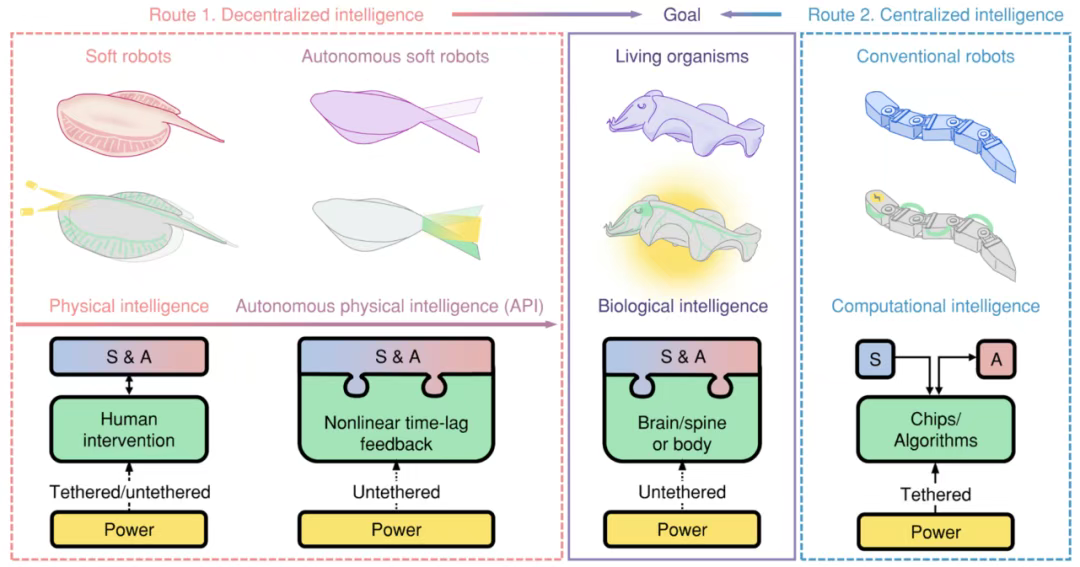
Fig.1.Two distinct routes for the development of bioinspired robots.图1展示了仿生机器人发展的两条主要路线:一是基于中央处理器和算法的”计算智能(computationalintelligence)”,通过集成传感器、执行器、决策模块和能源模块实现集中或分布式控制:二是“物理智能(physical intelligence)",即将感知、决策和驱动等功能直接嵌入材料本体,实现去中心化的智能。其中,物理智能通过内嵌的非线性时滞反馈,使各部分都能自主感知和响应外界,实现无需人工干预的持续自主运动,推动软体机器人向类生命系统演进。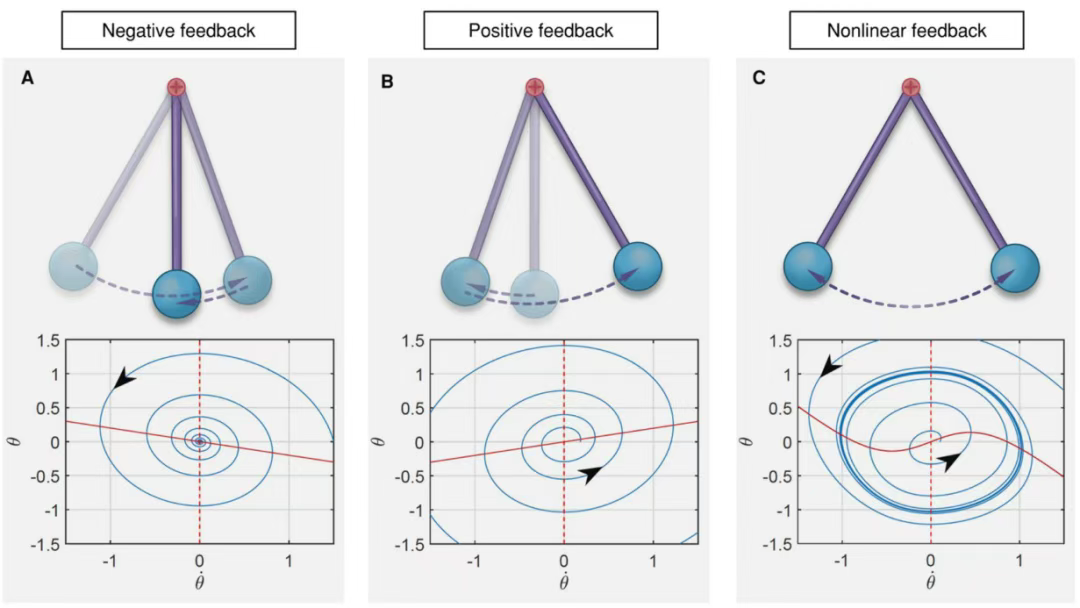
Fig.2.Comparison of various feedback systems and their trajectories.图2比较了不同反馈系统的动力学轨迹:A为负反馈系统,扰动后状态会逐渐收敛回平衡点,实现系统稳定;B为正反馈系统,扰动会被放大,导致系统远离平衡点,直至不稳定;C为非线性反馈系统结合了正负反馈,系统可形成稳定的极限周期,实现持续周期性振荡。该图直观展示了反馈类型对系统行为的决定性影响,是理解自主软体机器人运动的理论基础。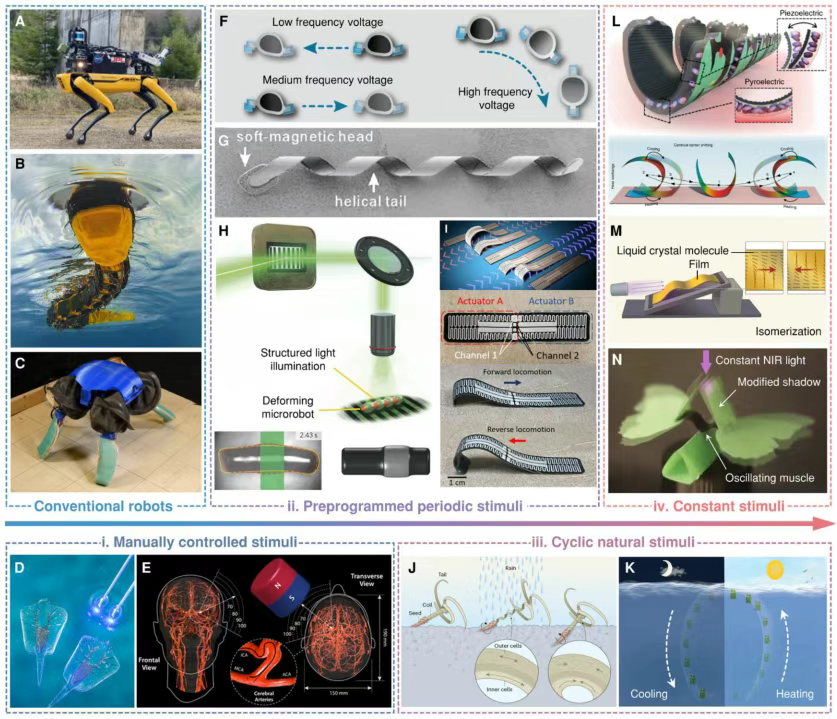
Fig.3. Evolution of conventional robots and soft robots with anincreasing level of autonomy图3表明引入对于外界刺激的控制将会影响软体机器人的自主性类似于传统机器人从手动控制、预设响应到机器学习的演进路径。作者以控制软体机器人的刺激方式将其划分为四个阶段:(i)完全人工控制、(ii)预设周期性刺激、(iii)自然界周期性刺激,以及(iv)恒定刺激的自持续运动。其中前三阶段依赖负反馈环维持系统稳定体现基础的物理智能,而第四阶段则通过非线性时滞反馈机制,推动实现真正的API。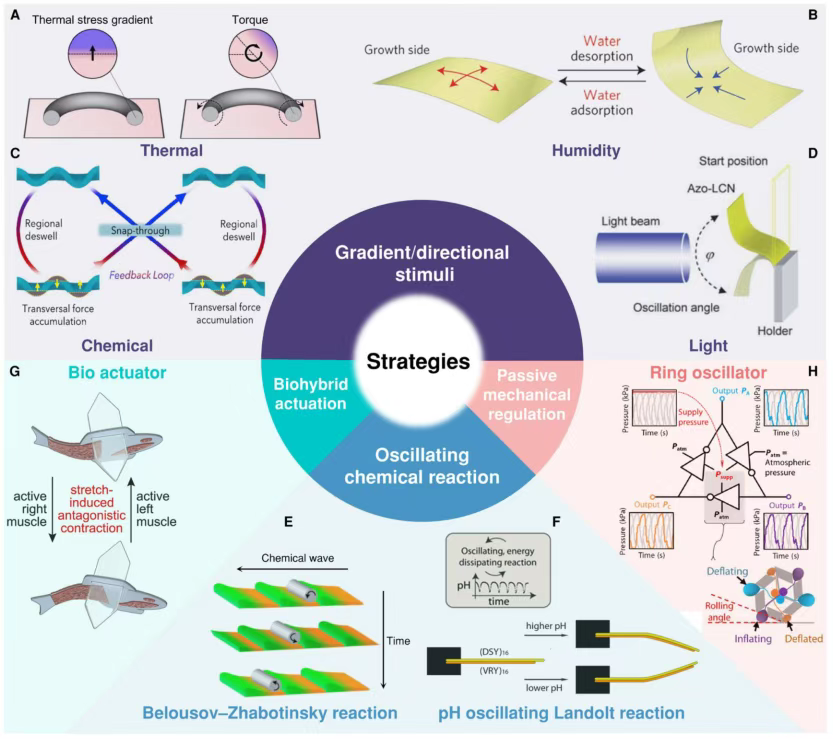
Fig.4.Strategies to create self-continuous motions图 4 总结了实现基于 API自持续运动的多种策略,主要包括四类机制:(i)通过构建具有梯度或方向性的外部刺激场(如温度、湿度、化学或光照梯度)诱导运动;(ii)基于化学振荡反应,如 Belousov-Zhabotinsky 反应驱动的周期性形变;(iii)利用生物杂交系统,将活细胞或肌肉组织嵌入材料中以实现活体式驱动;以及(iv)通过被动机械结构设计。这些策略展示了在不依赖复杂电子控制的条件下,通过材料-结构-环境的耦合设计实现类生命体的持续运动能力。此外,文章进一步总结了基于 API实现的自持续运动在多种环境中的表现形式,包括陆地运动(如行走、爬行、翻转、滚动、跳跃)水中运动(如波动、振荡、漂浮、脉动)、潜在的空中运动(如拍翼旋转、飘浮)、以及多环境下多模态运动。作者还指出,为实现真正的系统级自主软体机器人,未来需重点发展若干关键方向,包括:扩大尺寸以突破微型尺寸的限制、能量获取与利用、群体行为、多功能集成,以及建模与仿真。最终,作者强调实现高度自主软体机器人的过程本质上是高度跨学科的,需化学、材料学、力学、数学、机器人学与生物学等多个领域的协同合作。未来的 API软体机器人将能够利用环境能量驱动,具备多模态运动能力、信息存储、通信与环境响应决策机制,并展现出大规模群体智能行为,从而更贴近现实工程应用的需求。