详解鸿蒙仓颉开发语言中的计时器
今天又到了大家喜闻乐见的科普环节,也可以说是踩坑环节,哈哈哈。今天聊一聊仓颉开发语言中的计时器,这部分可老有意思了。
为什么这么说呢,因为关于仓颉的计时器你几乎搜不到任何的文档,也没有相关的代码提示,可以说是一写一个不吱声。
但是它还是被幽蓝君发现了蛛丝马迹,今天就把它分享给大家。
仓颉的计时器藏在std.sync包里,名字叫Timer,但是使用时只导入Timer包还不够,我们需要导入这几个模块:
import std.time.*
import std.sync.Timer
import std.sync.CatchupStyle计时器的写法也是别出心裁,它有几种模式,下面为大家一一介绍
Timer.after(Duration.minute, { => AppLog.info('这是after计时器'); return Duration.second})这行代码的意思是,计时器在一分钟以后执行,然后每分钟执行一次App.info打印。这个模式比较奇怪,它的执行间隔在执行方法中返回。
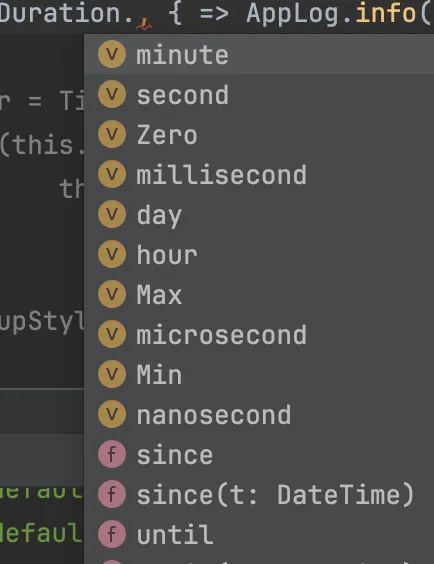
另一个比较奇怪的地方不知道大家有没有发现,计时器中的延迟时间和执行间隔这两个时间参数使用的是Duration类型的枚举,就是说只能使用它设定好的几个值,目前给出的时间值有Zero、second、minute、hour等,可以看到都是时间整数,你如果想要两秒执行一次,或者是二分之一秒执行一次大概是不行的。
Timer.once(Duration.minute,{=> AppLog.info('这是once计时器');})这种模式大家应该一眼就能看出来,这是只执行一次的计时器,延迟时间是一分钟后。
Timer.repeat(Duration.Zero, Duration.second, {=> AppLog.info('这是repeat计时器'); }, style: CatchupStyle.Skip)repeat是重复性执行的计时器,Duration.Zero是延迟执行的时间,Duration.second是执行的间隔,这里出现了新的参数style,它的名字叫追平策略,官方给出的解释是:当 Task 执行时间过长时,后续任务执行时间点可能发生延迟,不同的追平策略适用于不同的场景。
Timer.repeatDuring(period: Duration, delay: Duration, interval: Duration, task: () -> Unit, style: CatchupStyle)这个计时器和上面的repeat类似,它多了一个参数period,意思是重复周期的最大持续时间。类似的还有repeatTimes,它指定了任务的最大执行次数:
Timer.repeatTimes(count: Int64, delay: Duration, interval: Duration, task: () -> Unit, style: CatchupStyle)以上就是关于仓颉开发语言中计时器的详细内容,感谢阅读,再次祝大家假期愉快。#HarmonyOS语言##仓颉##购物#